We've had the nav mesh and path finding in for a while, I just haven't had time to make a post about it. Here's what our nav mesh looks like currently:
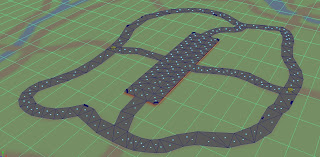
Right now it's only the actual dirt/concrete/DG/whatever paths in the park, it doesn't include grassy areas yet. There are plans in the future to mesherize the grassy areas as well, but we need some way to assign terrain modifiers to polygons so that AI knows what kind of terrain it is walking on. The other thing you will notice about the nav mesh is that it is all triangles, instead of n-gons. This is unfortunately a shortcoming of Havok, it refuses to read anything but triangles. This means more polygons than strictly necessary, and also it means that our centroids kind of make a wobbly line. That being said, it works pretty well, and the local avoidance gets the AI to alter it's path and keeps them from looking like they are in one big line.
 Right now it's only the actual dirt/concrete/DG/whatever paths in the park, it doesn't include grassy areas yet. There are plans in the future to mesherize the grassy areas as well, but we need some way to assign terrain modifiers to polygons so that AI knows what kind of terrain it is walking on. The other thing you will notice about the nav mesh is that it is all triangles, instead of n-gons. This is unfortunately a shortcoming of Havok, it refuses to read anything but triangles. This means more polygons than strictly necessary, and also it means that our centroids kind of make a wobbly line. That being said, it works pretty well, and the local avoidance gets the AI to alter it's path and keeps them from looking like they are in one big line.
Right now it's only the actual dirt/concrete/DG/whatever paths in the park, it doesn't include grassy areas yet. There are plans in the future to mesherize the grassy areas as well, but we need some way to assign terrain modifiers to polygons so that AI knows what kind of terrain it is walking on. The other thing you will notice about the nav mesh is that it is all triangles, instead of n-gons. This is unfortunately a shortcoming of Havok, it refuses to read anything but triangles. This means more polygons than strictly necessary, and also it means that our centroids kind of make a wobbly line. That being said, it works pretty well, and the local avoidance gets the AI to alter it's path and keeps them from looking like they are in one big line.
No comments:
Post a Comment